Nawigacja GPS z automatycznym sterowaniem
Zautomatyzowany system precyzyjnego kierowania pojazdami rolniczymi.

Usługa dostarczana wraz z AgroOSA
- Dokładność GPS +/- 2.5 cm z bazą RTK
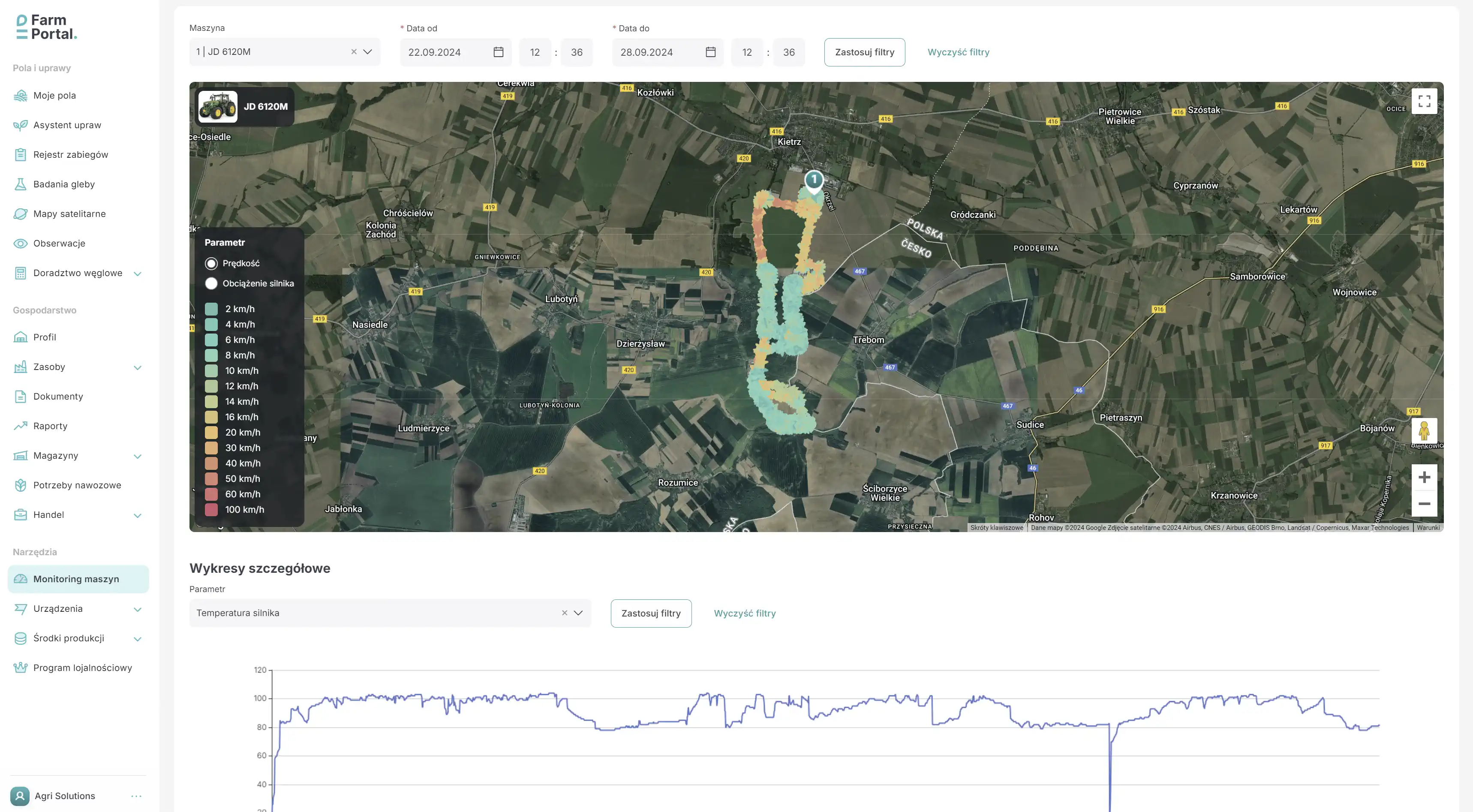
- Trasy przejazdu i raporty w aplikacji FarmPortal
- Montaż w całej Polsce wraz ze szkoleniem
- Łatwe w obsłudze oprogramowanie w języku polskim
- Ponad 500 instalacji
- Proste przenoszenie między pojazdami
Uzyskaj dofinansowanie 200 000 zł w ramach
- Rolnictwo 4.0, lub
- Inwestycje przyczyniające się do ochrony środowiska

Podstawowe funkcje systemu agroOSA
Systemy sterowania
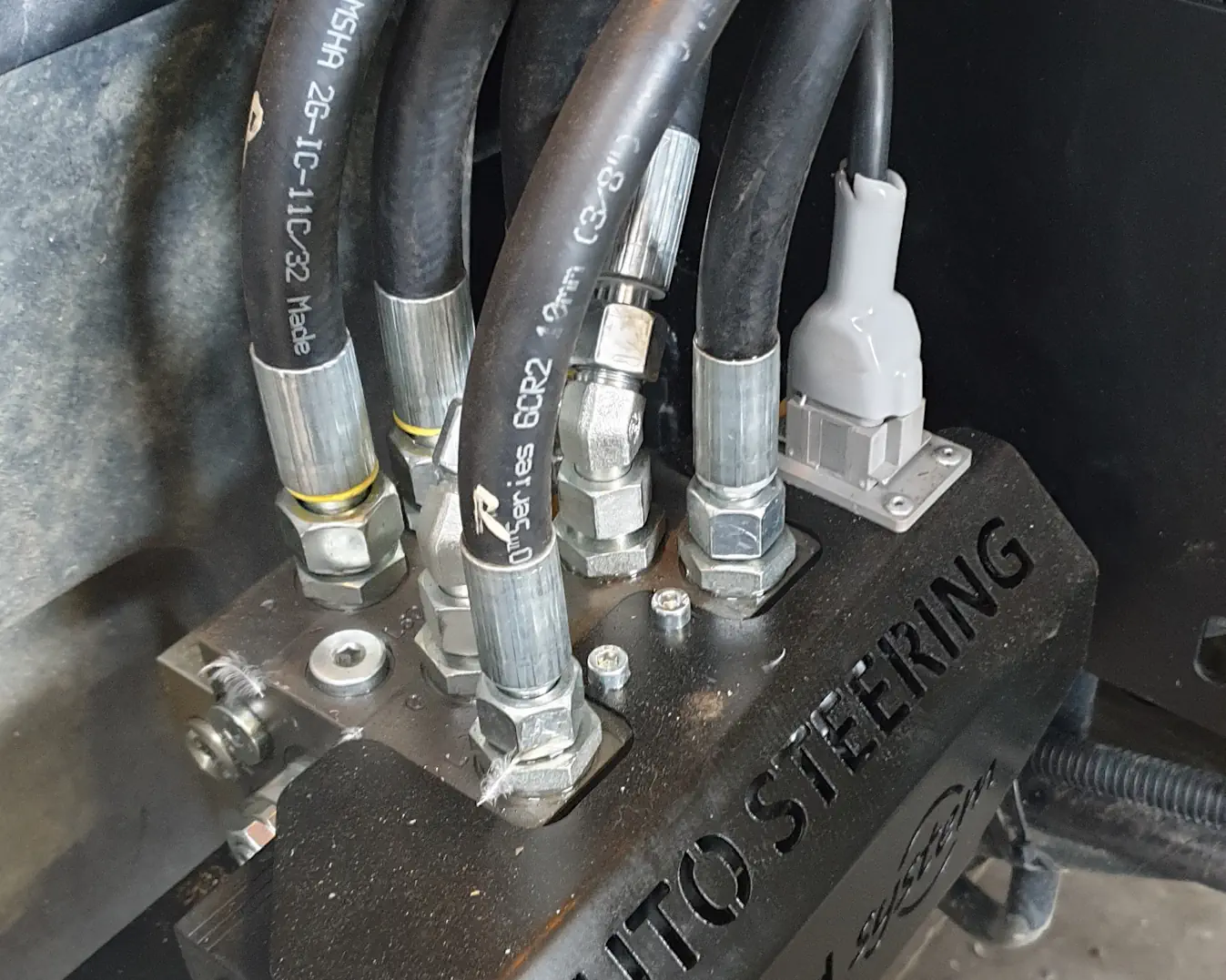
Automatyczne sterowanie pojazdem
Zawór hydrauliczny montowany w ciągniku zapewnia dokładne prowadzenie z zachowaniem precyzji kierunku wyznaczonego przez operatora w aplikacji nawigacji – pełen zakres funkcjonalny w niskich prędkościach ( od 0,05 km/h).
Dzięki korekcie sygnału RTK dostępnej on-line system pozwala zachować powtarzalność przejazdów do +/- 2 cm ( rok do roku, dzień do dnia) podczas prac polowych.
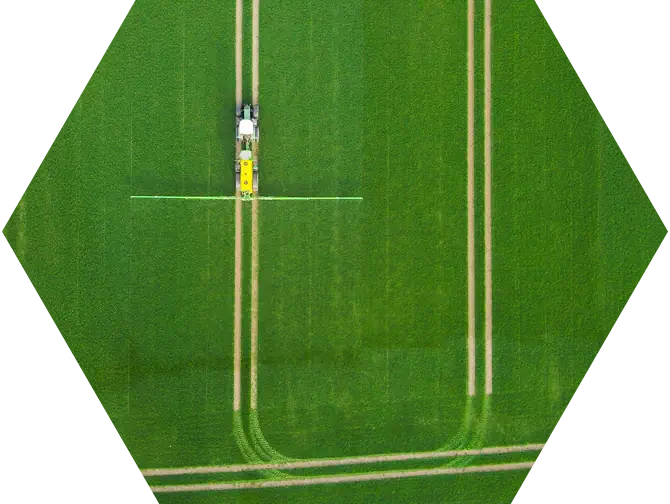
Automatyczne nawracanie
Zintegrowanie zaawansowanych algorytmów rolnictwa precyzyjnego w oprogramowaniu nawigacji umożliwia automatyczne zawracanie ciągnikiem – operator może ustawić kierunek i wybrać ścieżkę skrętu oraz wyznaczyć ścieżki technologiczne przy uwzględnieniu odpowiedniej szerokości narzędzi roboczych. Minimalizacja nakładek i omijaków pozwala wydatnie oszczędzić paliwo i materiał roboczy. Tempo i produktywność prac polowych rośnie.
Zapisywanie prac i obsługa sterowania w aplikacji
Proste i intuicyjne oprogramowanie w języku polskim pozwala dodawać pola, maszyny robocze wraz z ich ustawieniami, zapisywać i odtwarzać parametry pracy ciągnika, kontynuować przerwane prace wraz z edycją narzędzi. Oprogramowanie na bieżąco przekazuje aktualne informacje o prowadzonych zabiegach, stopniu ich wykonania i wydajności, kierunku jazdy, ścieżkach technologicznych i innych pożytecznych parametrach.


Obsługa narzędzi
Sterowanie sekcjami narzędzi roboczych jest już możliwe – mamy rozwiązania pozwalające na sterowanie do 16 sekcji analogowo, w najbliższej przyszłości ruszają prace rozwojowe nad wdrożeniem komunikacji z ISOBUS.
Monitoring systemu 24/7
Monitoring systemu gwarantuje szybką i reakcję usunięcie usterki lub wymianę urządzenia w przypadku awarii.

Masz pytania?
Skontaktuj się z nami

Tomasz Rupacki
Business Development Manager
Zasada działania systemu agroOSA
Stacja RTK
RTK (Real Time Kinematic) przesyła dane korekcyjne ze stacji do odbiornika (pojazdu). Dokładność wyznaczania drogi przejazdu wykonywana jest z precyzją do +/- 2cm. Maksymalny dystans do bazy RTK to 30 - 40km.
Odbiornik GPS
Odbiera sygnał GPS oraz korektę RTK do wyznaczania optymalnej drogi przejazdu i przekazuje pozycję do systemu sterowania pojazdem.
Ścieżka technologiczna
Automatycznie wytyczona droga przejazdu z zachowaniem odpowiednich odległości i szerokości dla maszyny i narzędzi.
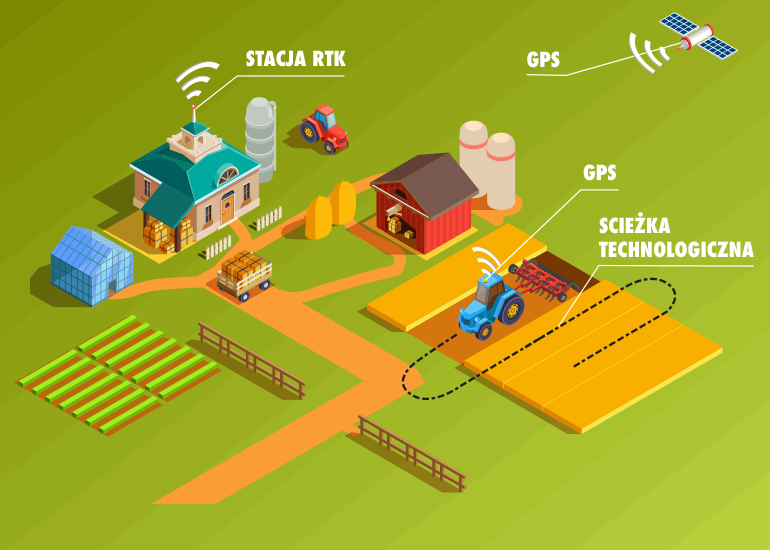
System składa się z 4 głównych elementów




Możliwości nawigacji GPS z autosterowaniem
- Mapowanie pól, pomiar powierzchni, wskazanie pokrycia w % lub ha powierzchni poddanej zabiegowi agrotechnicznemu, eliminacja nakładek i omijaków podczas wykonywania pracy
- Elektryczne sterowanie sekcjami narzędzia roboczego ( 1 – 16 sekcji ) w celu omijania zakładek
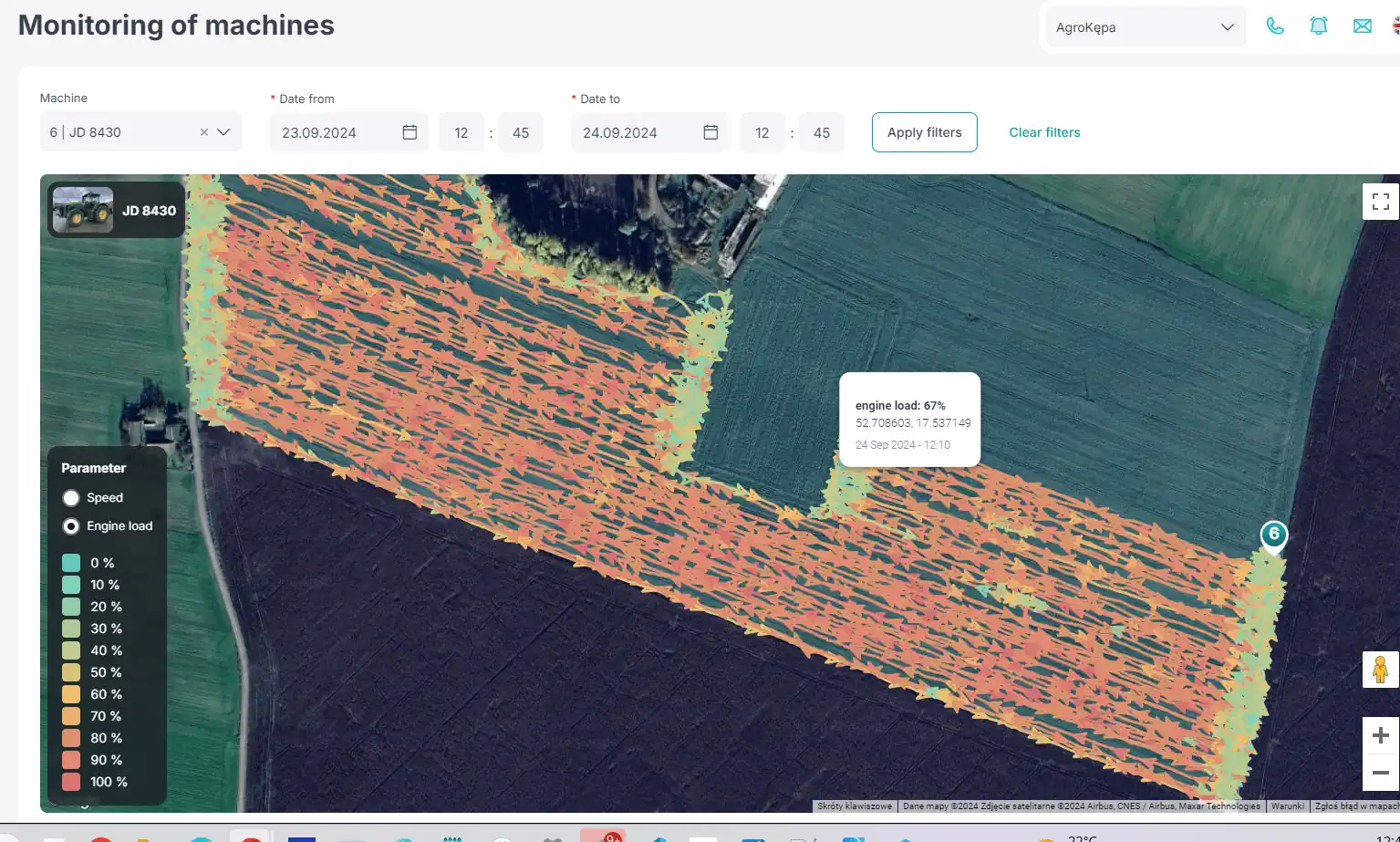
- Monitoring pozycji i pracy maszyny
- Archiwizacja wykonanych zabiegów z datą ich wykonania w aplikacji FarmCloud
- Wznawianie przerwanej pracy – kontynuacja zabiegu agrotechnicznego
- Wyliczanie na bieżąco podczas jazdy/pracy teoretycznej wydajności w ha/h
- Dodawanie linii prostych AB na mapie lotniczej / satelitarnej oraz krzywych AB, wyznaczanie linii prowadzenia ciągnika
- Tryb wirtualnego poprzeczniaka, ostrzeżenia dźwiękowe przed uwrociem oraz podczas przechodzenia maszyny przez linię uwrocia
- Prowadzenie maszyny po wyznaczonej linii z dokładnością +/- 2cm dla kierownicy elektrycznej lub modułu hydrauliki
- Odczyt danych CAN z ciągników i innych maszyn rolniczych
- Rzeczywiste zużycie i poziom paliwa, pełny przebieg, temperatura i inne parametry silnika
- Baza RTK z zasilaczem
- Zasilanie 10 - 30V